使用SOLIDWORKS API查找体的边界圆柱体
 { width=400 }
{ width=400 }
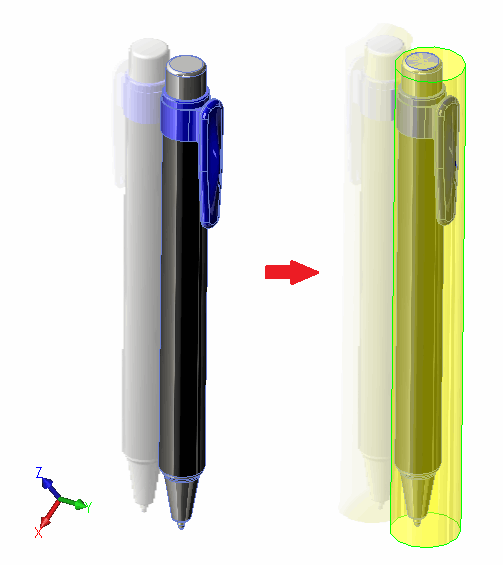
本示例演示如何使用SOLIDWORKS API查找实体体的边界圆柱体。
宏要求用户选择输入参数以确定圆柱体的方向。用户可以选择圆形面(在这种情况下,轴将用作参考)或平面特征(在这种情况下,法线将用作参考)。
结果将创建一个新的特征,表示体的圆柱边界。
该宏将为任意方向的实体创建最佳拟合边界圆柱体。体不一定需要与XYZ轴对齐。
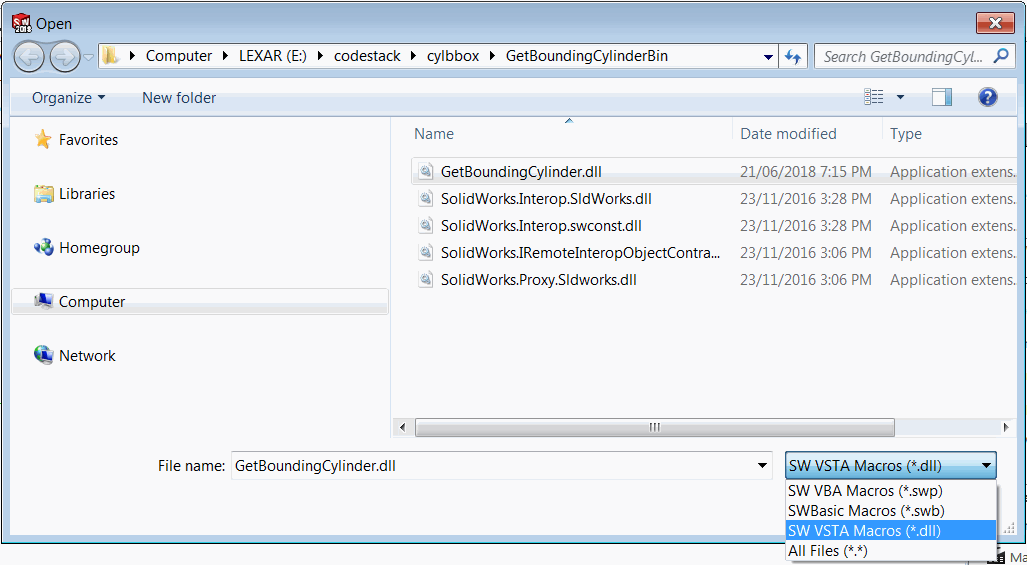
可以在此链接下载宏。解压缩宏并从“工具”->“宏”->“运行”菜单命令中运行它。按照下面的说明指定正确的过滤器:
 { width=500 }
{ width=500 }
SolidWorksMacro.cs
这是VSTA宏的入口点。在此模块中处理输入参数并创建输出体。
using SolidWorks.Interop.sldworks;
using SolidWorks.Interop.swconst;
using System.Runtime.InteropServices;
using System;
using CodeStack;
namespace CodeStack
{
public partial class SolidWorksMacro
{
public void Main()
{
try
{
IModelDoc2 model = swApp.IActiveDoc2;
if (model is IPartDoc)
{
BodyHelper proc = new BodyHelper(swApp.IGetMathUtility());
object selObj = model.ISelectionManager.GetSelectedObject6(1, -1);
CylinderParams cylParams = proc.GetBoundingCylinder(
GetBodyToProcess(model as IPartDoc, selObj),
GetDirection(model, selObj));
CreateCylindricalBody(model as IPartDoc, cylParams);
}
else
{
throw new NullReferenceException("未打开零件文档");
}
}
catch (Exception ex)
{
swApp.SendMsgToUser2("错误:" + ex.Message,
(int)swMessageBoxIcon_e.swMbStop, (int)swMessageBoxBtn_e.swMbOk);
}
}
private void CreateCylindricalBody(IPartDoc part, CylinderParams cylParams)
{
IBody2 cylTempBody = swApp.IGetModeler().CreateBodyFromCyl(new double[]
{
cylParams.Origin[0], cylParams.Origin[1], cylParams.Origin[2],
cylParams.Direction[0], cylParams.Direction[1], cylParams.Direction[2],
cylParams.Radius, cylParams.Height
}) as IBody2;
IFeature feat = part.CreateFeatureFromBody3(cylTempBody, false,
(int)swCreateFeatureBodyOpts_e.swCreateFeatureBodySimplify) as IFeature;
IBody2 body = feat.GetBody() as IBody2;
body.MaterialPropertyValues2 = new double[] { 1, 1, 0, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5 };
}
private IBody2 GetBodyToProcess(IPartDoc part, object inputObj)
{
if (inputObj is IFace2)
{
return (inputObj as IFace2).GetBody() as IBody2;
}
else
{
object[] solidBodies = part.GetBodies2((int)swBodyType_e.swSolidBody, true) as object[];
if (solidBodies != null && solidBodies.Length == 1)
{
return solidBodies[0] as IBody2;
}
}
throw new NullReferenceException("无法找到输入体。请选择圆柱面或使用单个实体零件");
}
private double[] GetDirection(IModelDoc2 model, object inputObj)
{
if (inputObj is IFace2)
{
ISurface surf = (inputObj as IFace2).GetSurface() as ISurface;
if (surf.IsCylinder())
{
double[] cylParams = surf.CylinderParams as double[];
return new double[] { cylParams[3], cylParams[4], cylParams[5] };
}
}
else if (inputObj is IFeature)
{
IRefPlane refPlane = (inputObj as IFeature).GetSpecificFeature2() as IRefPlane;
if (refPlane != null)
{
IMathUtility mathUtils = swApp.GetMathUtility() as IMathUtility;
IMathVector vec = mathUtils.CreateVector(new double[] { 0, 0, 1 }) as IMathVector;
vec = vec.MultiplyTransform(refPlane.Transform) as IMathVector;
return vec.ArrayData as double[];
}
}
throw new NullReferenceException("无法找到方向。请选择圆柱面或平面");
}
public SldWorks swApp;
}
}
CylinderParams.cs
此结构表示边界圆柱体的详细信息
using System;
using System.Collections.Generic;
using System.Text;
namespace CodeStack
{
public class CylinderParams
{
public double Height;
public double[] Origin;
public double[] Direction;
public double Radius;
public CylinderParams(double height, double[] origin, double[] dir, double rad)
{
Height = height;
Origin = origin;
Radius = rad;
Direction = dir;
}
}
}
BodyHelper.cs
此实用程序类允许查找体的方向并将其适配到圆柱体
using System;
using System.Collections.Generic;
using System.Text;
using SolidWorks.Interop.sldworks;
using SolidWorks.Interop.swconst;
namespace CodeStack
{
public class BodyHelper
{
private IMathUtility m_MathUtils;
private MathHelper m_MathHelper;
public BodyHelper(IMathUtility mathUtils)
{
m_MathUtils = mathUtils;
m_MathHelper = new MathHelper(mathUtils);
}
public CylinderParams GetBoundingCylinder(IBody2 body, double[] dir)
{
double[] xAxis = new double[] { 1, 0, 0 };
double[] yAxis = new double[] { 0, 1, 0 };
double[] zAxis = new double[] { 0, 0, 1 };
bool isAligned = m_MathHelper.ArrayEqual(dir, yAxis);
IMathTransform alignTransform = null;
if (!isAligned)
{
alignTransform = m_MathHelper.GetTransformBetweenVectorsAroundPoint(
dir, yAxis, new double[] { 0, 0, 0 });
IBody2 bodyCopy = body.ICopy();
bodyCopy.ApplyTransform(alignTransform as MathTransform);
body = bodyCopy;
}
double[] rootPt;
double[] endPt;
GetExtremePoints(body, yAxis, out rootPt, out endPt);
double height = Math.Abs(endPt[1] - rootPt[1]);
dir = new double[] { 0, endPt[1] - rootPt[1], 0 };
List<double[]> perPoints = GetPerimeterPoints(body, xAxis, zAxis);
List<Point> points = new List<Point>();
foreach (double[] pt in perPoints)
{
points.Add(new Point(pt[0], pt[2]));
}
Circle cir = SmallestEnclosingCircle.MakeCircle(points);
double[] circCenter = new double[] { cir.c.x, rootPt[1], cir.c.y };
if (!isAligned)
{
circCenter = m_MathHelper.TransformPoint(circCenter, alignTransform.IInverse());
dir = m_MathHelper.TransformVector(dir, alignTransform.IInverse());
}
double radius = cir.r;
return new CylinderParams(height, circCenter, dir, radius);
}
private List<double[]> GetPerimeterPoints(IBody2 body, params double[][] directions)
{
List<double[]> perPoints = new List<double[]>();
double[] pt1;
double[] pt2;
foreach (double[] dir in directions)
{
GetExtremePoints(body, dir, out pt1, out pt2);
perPoints.Add(pt1);
perPoints.Add(pt2);
}
return perPoints;
}
private void GetExtremePoints(IBody2 body, double[] dir, out double[] pt1, out double[] pt2)
{
double x;
double y;
double z;
body.GetExtremePoint(dir[0], dir[1], dir[2], out x, out y, out z);
pt1 = new double[] { x, y, z };
body.GetExtremePoint(-dir[0], -dir[1], -dir[2], out x, out y, out z);
pt2 = new double[] { x, y, z };
}
}
}
BodyHelper.cs
此模块提供了用于处理向量、变换和点的实用函数
using System;
using System.Collections.Generic;
using System.Text;
using SolidWorks.Interop.sldworks;
namespace CodeStack
{
public class MathHelper
{
private IMathUtility m_MathUtils;
public MathHelper(IMathUtility mathUtils)
{
m_MathUtils = mathUtils;
}
public double[] TransformVector(double[] dir, IMathTransform transform)
{
IMathVector vec = m_MathUtils.CreateVector(dir) as IMathVector;
vec = vec.MultiplyTransform(transform) as IMathVector;
return vec.ArrayData as double[];
}
public double[] TransformPoint(double[] pt, IMathTransform transform)
{
IMathPoint point = m_MathUtils.CreatePoint(pt) as IMathPoint;
point = point.MultiplyTransform(transform) as IMathPoint;
return point.ArrayData as double[];
}
public IMathTransform GetTransformBetweenVectorsAroundPoint(
double[] vec1, double[] vec2, double[] pt)
{
IMathVector mathVec1 = m_MathUtils.CreateVector(vec1) as IMathVector;
IMathVector mathVec2 = m_MathUtils.CreateVector(vec2) as IMathVector;
IMathVector crossVec = mathVec1.Cross(mathVec2) as IMathVector;
double dot = mathVec1.Dot(mathVec2);
double vec1Len = mathVec1.GetLength();
double vec2Len = mathVec2.GetLength();
double angle = Math.Acos(dot / vec1Len * vec2Len);
IMathPoint mathPt = m_MathUtils.CreatePoint(pt) as IMathPoint;
return m_MathUtils.CreateTransformRotateAxis(mathPt, crossVec, angle) as IMathTransform;
}
public bool ArrayEqual(double[] arr1, double[] arr2)
{
if (arr1 != null && arr2 != null)
{
if (arr1.Length == arr2.Length)
{
for (int i = 0; i < arr1.Length; i++)
{
if (arr1[i] != arr2[i])
{
return false;
}
}
}
}
return false;
}
}
}
此宏需要引用Smallest enclosing circle - Library (C#) by Project Nayuki。